Innehållsförteckning
Basbytesmatris, ortogonala matriser, metod rang och nolldimension,
Definitioner: kolonnrummet, rangen, nollrummet, nolldimensionen
Exempel: Basbyte vektor, är matrisen ortogonal? Ortogonal basbytesmatris, bestäm inversen av matris, matrismultiplikation
Basbytesmatris
”Prim” anger den nya basen.
En bas i 
En godtycklig vektor har koordinaterna

Skapar en matris där kolonnvektorerna är 





Ortogonala matriser
Definition ortogonal matris
En matris (

”Utgör en ortonormerad bas” innebär:
- Varje kolonnvektor har längd ett (
)
- Kolonnvektorerna är parvis ortogonala (
)
Sats ortogonal matris
Följande är ekvivalent:
i) Matrisen 
ii) Kolonnvektorerna i
iii) Radvekorerna i
iv)
v)
vi)



Metod för att ta fram rang respektive nolldimension
- Radreducera (gaussa)
.
- Räkna antalet pivotelement, som ger
(
)
- Antalet parametrar till
, ger nolldimensionen till
Definitioner
Kolonnrummet
För matrisen
definierar vi kolonnrummet som mängden av alla linjärkombinationer
av 



har lösning.
Rangen
Rangen låter vi vara maximala antalet linjärt oberoende vektorer bland 
Betecknas
Nollrummet
Nollrummet för 
Nolldimensionen
Maximalt antal linjärt oberoende lösningar till 

Betecknas 
Exempel
Ex.: Basbyte vektor
Har basen 

Kontrollera att ovanstående är en bas genom att:


Vilket samband gäller mellan 



Lösning

Alltså:

Alternativ lösning
Vi skriver om ovanstående med matriser.


Om 
Ex.: Är matrisen ortogonal?
Visa att matrisen 
Lösning







Ex.: Ortogonal basbytesmatris
Om basbytesmatrisen 

”De nya koordinaterna fås genom att ta S-transponat multiplicerat med de gamla koordinaterna”
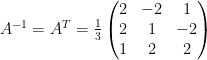
Ex.: Bestäm inversen av matris
Bestäm inversen av 
Lösning
Om ![\left[A\right|\left.I\right]\cdots\left[I\right|\left.A^{-1}\right]](https://s0.wp.com/latex.php?latex=%5Cleft%5BA%5Cright%7C%5Cleft.I%5Cright%5D%5Ccdots%5Cleft%5BI%5Cright%7C%5Cleft.A%5E%7B-1%7D%5Cright%5D&bg=ffffff&fg=000&s=0&c=20201002)
Snabblösning: Kontrollera om 

Ex.: Matrismultiplikation
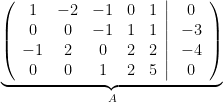

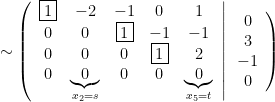
(Tre stycken pivotelement).









Vi radreducerade

Antalet parametrar är antalet kolonner-antal pivotelement.
